«aŲĘĘųŅÉ
¤ßķT┘YėŹ
┬ōŽĄ╬ęéā/Contact Us
 ĄžųĘŻ║╔Ž║Ż╩ąĘŅ┘tģ^(q©▒)ŪÓ┤Õµé(zh©©n)ąŪ╗╣½┬Ę188╠¢1┤▒
ĻÉĮø└ĒŻ║15021366229
ĄžųĘŻ║╔Ž║Ż╩ąĘŅ┘tģ^(q©▒)ŪÓ┤Õµé(zh©©n)ąŪ╗╣½┬Ę188╠¢1┤▒
ĻÉĮø└ĒŻ║15021366229 ĻÉĮø└ĒŻ║18616962314
QQŻ║76667015
ŠWųĘ:mm595.cn
Email:[email protected]
ūāŅl╩ĮŲżÄ¦▌ö╦═ÖC╣”┬╩ŲĮ║ŌĄ─┐žųŲ蹊┐
╬─š┬üĒį┤Ż║http://mm595.cn ░l(f©Ī)▓╝ĢrķgŻ║2018-08-02 15:48 ×gė[┤╬öĄŻ║
ŲżÄ¦▌ö╦═ÖCŠ▀ėą▀\ąąĘĆ(w©¦n)Č©Ūę▌ö╦═─▄┴”ÅŖĄ╚╠ž³c,ęč│╔×ķ├║ĄV▀\▌öŽĄĮy(t©»ng)Ą─ųžę¬įOéõĪŻ├║ĄVŠ«Ž┬Ą─ČÓÖC“īäė╩ĮŲżÄ¦▌ö╦═ÖCį┌▀\▌ö▀^│╠ųą,┤µį┌ų°įŁ├║žō▌d▓╗Š∙╝░Ųõ╦¹ę“╦ž,▌^ęūįņ│╔ļŖäėÖCų«ķgĄ─žō▌dĘų┼õ▓╗Š∙ĪŻ╚¶Ė„éĆ“īäėų«ķgĄ─╣”┬╩▓╗ŲĮ║Ō│╠Č╚│¼▀^ęÄ(gu©®)Č©Ž▐Č╚Ģr,╩▄┴”▌^┤¾Ą─“īäė╚▌ęū│÷¼F▀^▌dōpē─,śO┤¾Ąžė░Ēæ╔·«a▀\▌öĪŻ
ę“┤╦,×ķĘ└ų╣ę“žō▌dĘų┼õ▓╗Š∙Č°ōpē─,ČÓÖC“īäė╩ĮŲżÄ¦▌ö╦═ÖC,ąĶę¬į┌žō▌d│÷¼Fūā╗»Ģr▒Ż│ųĖ„“īäėĄ─▌ö│÷╣”┬╩į┌ę╗Č©Ą─▒╚└²ĘČć·ā╚ĪŻūāŅlš{╦┘ĘĮ╩Į▌^é„Įy(t©»ng)Ą─ę║┴”±Ņ║ŽŲ„“īäėĘĮ╩ĮŠ▀ėąą¦┬╩Ė▀Ą─ā×(y©Łu)³c,▌^┐╔┐žåóäėé„▌öčbų├Ą─“īäėĘĮ╩ĮŠ▀ėą│╔▒ŠĄ═ĪóįOéõ╣╩šŽęūė┌ŠSą▐ŠSūoĄ─╠ž³cĪŻ
ęįļpļŖÖC“īäėĄ─ŲżÄ¦▌ö╦═ÖC×ķī”Ž¾▀MąąĘų╬÷,×ķ┴╦▒ŻūCĖ„ļŖäėÖCĄ─▌ö│÷╣”┬╩į┌ę╗Č©ĘČć·ā╚▒Ż│ųŲĮ║Ō,Ė„éĆ“īäė┐╔ęį└¹ė├ūāŅl“īäėĘĮ╩Į▀Mąą“īäė,ŲõĖ„éĆ“īäė╦∙ąĶĄ─▐DŠžę└ō■žō║╔▀MąąĘų┼õĪŻĖ∙ō■ų„Å─ļŖÖCĄ─┐žųŲĘĮ╩Į▓╗═¼,ų„ļŖäėÖC═©▀^▓╔ė├▐D╦┘ĮoČ©▀Mąą┐žųŲ,×ķīŹ¼Fų„Å─ļŖäėÖCų«ķg─▄ē“īŹ¼F╣”┬╩ŲĮ║Ōąį─▄,ų„ļŖäėÖCī”Å─ļŖäėÖC▀MąąĄ─┐žųŲ╩Ū═©▀^ī”ļŖÖC▐DŠž▀MąąīŹĢrĖ·█ÖīŹ¼FĄ─ĪŻī”ļŖÖC▐DŠžĄ─Ė·█Ö┐╔ęį═©▀^└¹ė├ų▒Įė▐DŠž┼c┐šķgļŖē║╩Ė┴┐š{ųŲŽÓĮY║ŽĄ─ĘĮ╩ĮīŹ¼FĪŻ
1Īó╗∙ė┌▐DŠžĖ·ļSĄ─╣”┬╩ŲĮ║Ō┐žųŲįŁ└Ē
×ķīŹ¼FĦ╩Į▌ö╦═ÖCĖ„éĆ“īäėų«ķg╣”┬╩ŲĮ║Ō,▒Ż│ųų„Å─ļŖäėÖCų«ķgĄ─╦┘Č╚Ųź┼õ,═©▀^ī”ų„Å─ļŖÖCĄ─▌ö│÷▐DŠž▀Mąą┐žųŲ,Å─Č°ę▓īŹ¼Fī”ų„Å─ļŖÖCĄ─╣”┬╩┐žųŲČ°▀@╩Ū└¹ė├ļŖÖCĄ─žō▌dŽÓ╗ź±Ņ║ŽīŹ¼FĄ─ĪŻ
ŲżÄ¦▌ö╦═ÖC×ķīŹ¼F╦┘Č╚Ųź┼õ┐╔ęį═©▀^±Ņ║ŽĖ„ļŖÖCžō▌dĄ─ĘĮ╩ĮīŹ¼F,Ą½ę¬īŹ¼FŲżÄ¦▌ö╦═ÖCĖ„éĆ“īäėų«ķgĄ─╣”┬╩ŲĮ║Ō┐žųŲ,ąĶę¬×ķĖ„éĆ“īäė▀xō±║Ž▀m╣”┬╩┼õ▒╚Ą─ļŖäėÖC,Ųõ╣”┬╩┼õ▒╚ėų╩Ūę└ō■ļŖäėÖCĄ─ąį─▄┼c“īäėįOéõĄ─╠žąįįOėŗ┼õ▒╚▀Mąą▀xō±Ą─ĪŻ
2Īó╗∙ė┌▐DŠžķ]Łh(hu©ón)Ą─╣”┬╩ŲĮ║Ō┐žųŲĘĮ░Ė
×ķīŹ¼Fų„Å─ļŖÖC╣”┬╩ŲĮ║Ō,įōĘĮ░Ė═©▀^└¹ė├▐DŠžĖ·ļSĄ─┐žųŲįŁ└ĒīŹ¼F─┐ś╦ĪŻį┌īŹ¼FįōĘĮ░ĖĢrīóī”ļŖÖCĄ─▐DŠžĘų┼õĘĮ╩Įį┌ļŖÖC╣”┬╩▌ö│÷Ģr▀Mąąæ¬ė├ĪŻę└ō■ęį╔ŽįŁ└ĒĮ©┴ó┐žųŲ┐“łD,╚ńŽ┬ĒōłD1╦∙╩ŠĪŻłD1ų„Å─ā╔éĆ┐žųŲ╗ž┬Ę▒Ē╩Š×ķ:ī”▌ö╦═ÖCŽĄĮy(t©»ng)▀MąąūāŅlš{╦┘┐žųŲ┐╔ęį═©▀^ų„ļŖäėÖCM1Ą─ūāŅlŲ„īŹ¼FĪŻų„ļŖÖCMĄ─▐DŠžįOČ©ųĄ×ķ╦┘Č╚Łh(hu©ón)š{╣Ø(ji©”)Ų„Ą─▌ö│÷ųĄ,┤┼═©Łh(hu©ón)┐žųŲ╩Ūę└ō■ā╔┼_ļŖäėÖCį┌Ė„ūįŽĄĮy(t©»ng)ųąĄ─┤┼═©┴┐øQČ©,▀MČ°īŹ¼Fų▒Įė▐DŠž┐žųŲ,▀_ĄĮ┴╦Ė„┼_ļŖÖCĄ─▐DŠžŲĮ║Ō┼c╣”┬╩ŲĮ║ŌĪŻį┌╣”┬╩ŲĮ║ŌŽĄĮy(t©»ng)ųą,ė╔ė┌ų▒Įė▐DŠž┐žųŲ┐╔īŹ¼Fī”ļŖ┤┼▐DŠž▀Mąą┐žųŲŪę¤oąĶ┐╝æ]Č©ūėļŖ┴„Ą─±Ņ║ŽąįĄ─╠ž³c,×ķīŹ¼FÅ─ļŖÖC▐DŠžĖ·ļSų„ļŖÖCĄ─å¢Ņ},┐╔ęį═©▀^└¹ė├ų▒Įė▐DŠž┐žųŲĘĮ╩ĮüĒīŹ¼FĪŻ
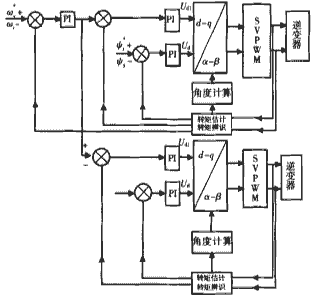
łD1ļpļŖäėÖC═Žäė╣”┬╩ŲĮ║Ō┐žųŲ┐“łD
é„Įy(t©»ng)Ą─ų▒Įė▐DŠž┐žųŲ═∙═∙┤µį┌ų°ķ_ĻPŅl┬╩▓╗╣╠Č©,Ą═╦┘Ģr▐DŠž├}äė┤¾Ą╚╚▒³c,ßśī”ęį╔Ž▓╗ūŃų«╠Ä,▒Š╬─═©▀^ßŖė├PIš{╣Ø(ji©”)Ų„╚Ī┤·┴╦é„Įy(t©»ng)Ą─£■Łh(hu©ón)▒╚▌^Ų„Ą─ĘĮ╩ĮĮŌøQ▓╗ūŃų«╠ÄĪŻ═©▀^ī”ļŖē║╩Ė┴┐U4ĪóUį┌═¼▓Įą²▐Dū°ś╦ŽĄŽ┬▀MąąÖz£y,īóÖz£yĄ├ĄĮĄ─öĄō■═©▀^▐DōQĄ├ĄĮņoų╣ū°ś╦ŽĄŽ┬Ą─ģó┐╝ļŖē║UĪóU,▒Ń┐╔ī”─µūāŲ„▀Mąą┐šķgļŖē║╩Ė┴┐š{ųŲ( SVPWM)ĪŻ×ķ┴╦īŹ¼F┤┼═©ā×(y©Łu)╗»┼cĖ³╝ėŲĮĘĆ(w©¦n)Ą─▀\ąąļŖÖC┐╔═©▀^└¹ė├ų▒Įė▐DŠž┼cSVMŽÓĮY║ŽĄ─┐žųŲĘĮ╩Į▀_ĄĮ─┐ś╦ĪŻ
ŽÓĻPą┬┬ä
- ŲżÄ¦▌ö╦═ÖC╦║┴č╣╩šŽ╝░ŲõĘ└ūo┤ļ╩®Ęų╬÷2018-11-15
- ØL═▓▌ö╦═ÖCĄ─░l(f©Ī)š╣╝░¼FĀŅ蹊┐Ż©Č■Ż®2018-11-15
- ØL═▓▌ö╦═ÖCĄ─░l(f©Ī)š╣╝░¼FĀŅ蹊┐Ż©ę╗Ż®2018-11-15
- ŲżÄ¦▌ö╦═ÖC╣╠¾w╬’┴ŽĘQųžĮo┴ŽŽĄĮy(t©»ng)įOėŗ│§╠Į2018-11-01
- ─”▓┴╩ĮĘeĘ┼ØL═▓▌ö╦═ÖCčbų├Ą─įOėŗ2018-11-01
- ØL═▓▌ö╦═ÖCPLC┐žųŲ╝╝ągį┌┐šš{╔·«aŽĄĮy(t©»ng)ųąĄ─æ¬ė├2018-11-01





